NU Camera Orbit Trajectory through Co-robot Arm
The animation video for the Camera Orbit Trajectory through a 6-DOF Co-robot Arm for ME 5250 (Northeastern University)
The animation video for the Camera Orbit Trajectory through a 6-DOF Co-robot Arm for ME 5250 (Northeastern University)
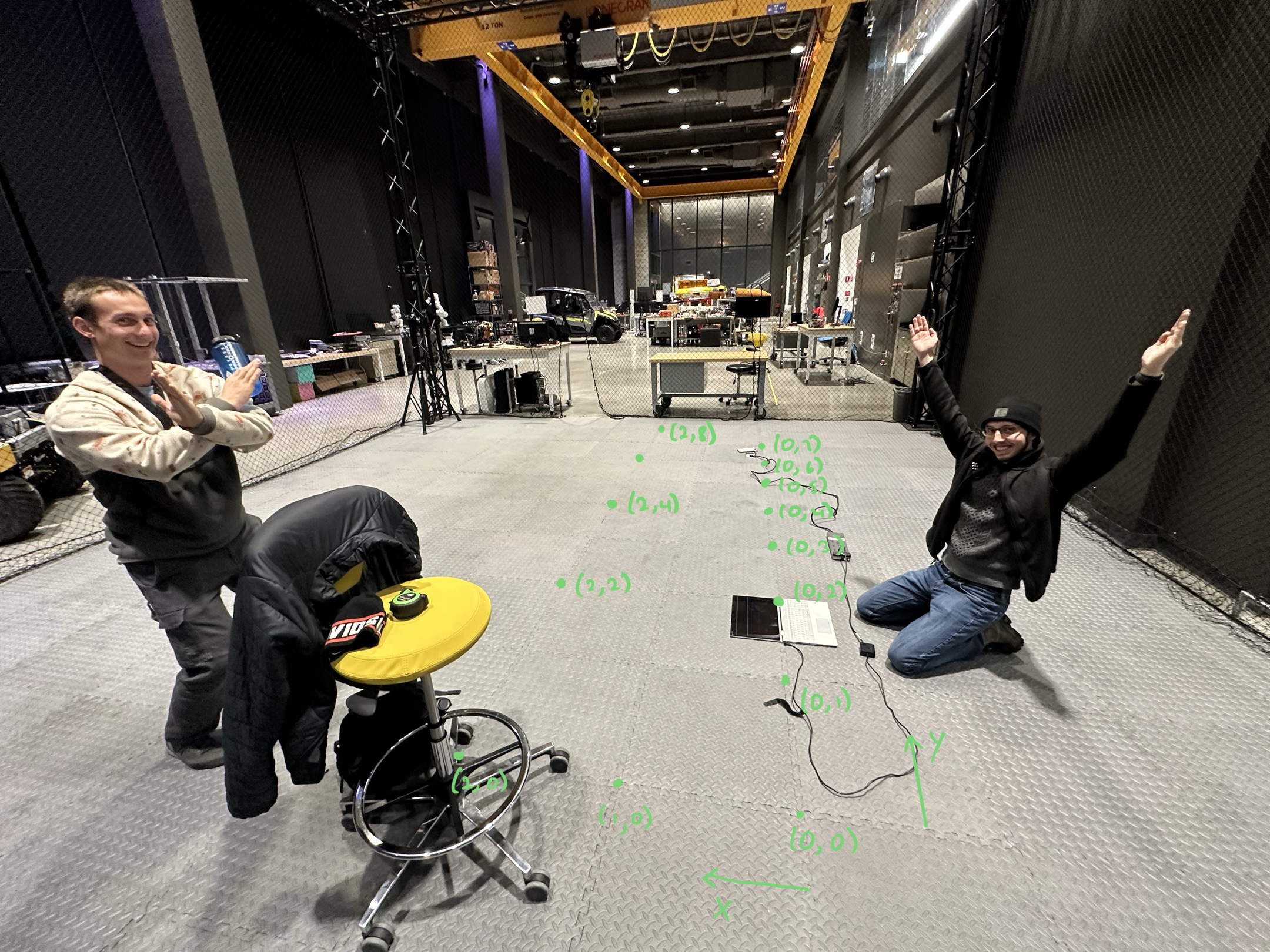
Localization via Wi-Fi through RSSI/BSSID Pair Training - Final Project for EECE 5554 (Northeastern University)
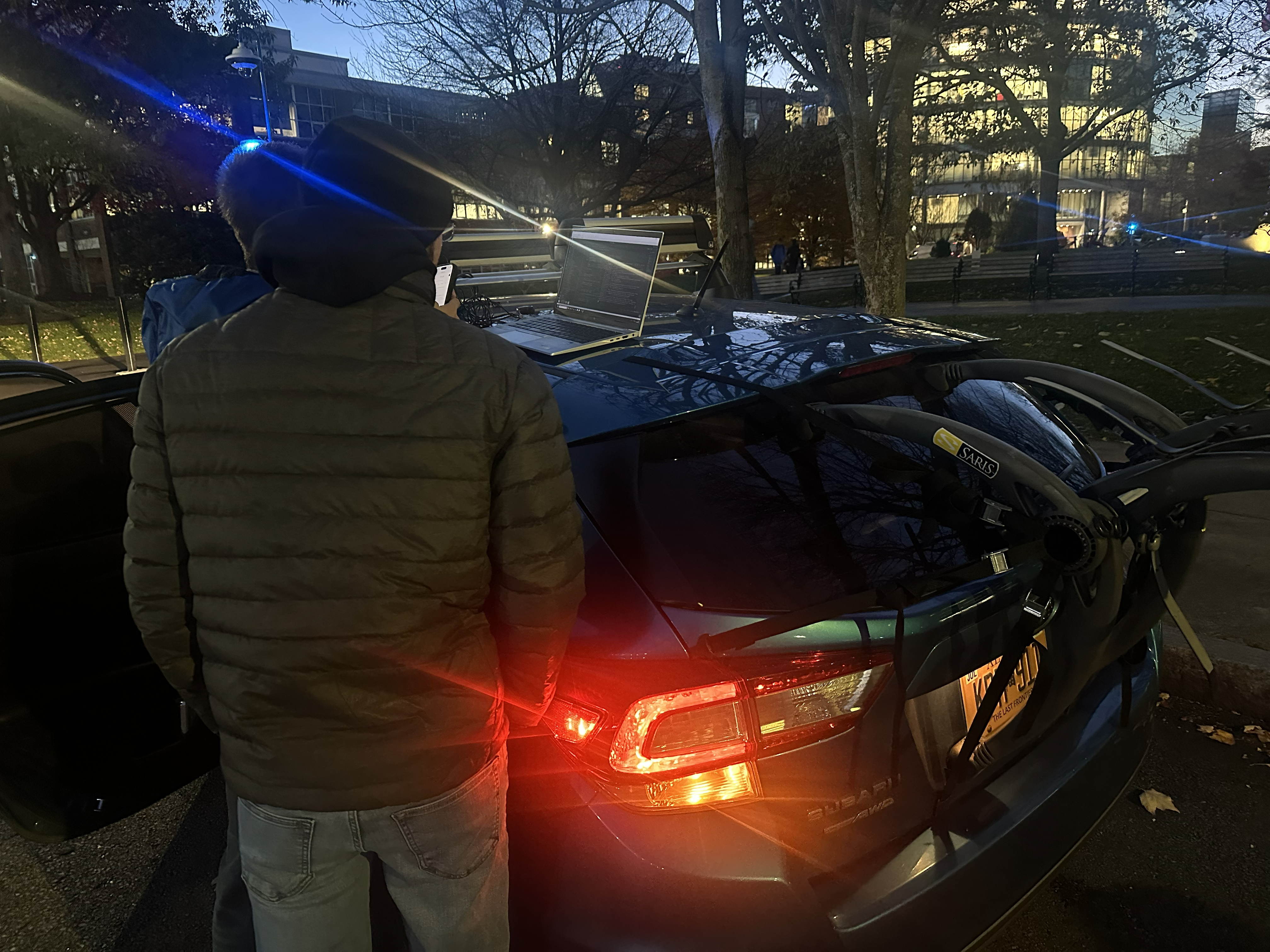
GPS-IMU Sensor Fusion for Vehicle Position Estimation for EECE 5554 (Northeastern University)
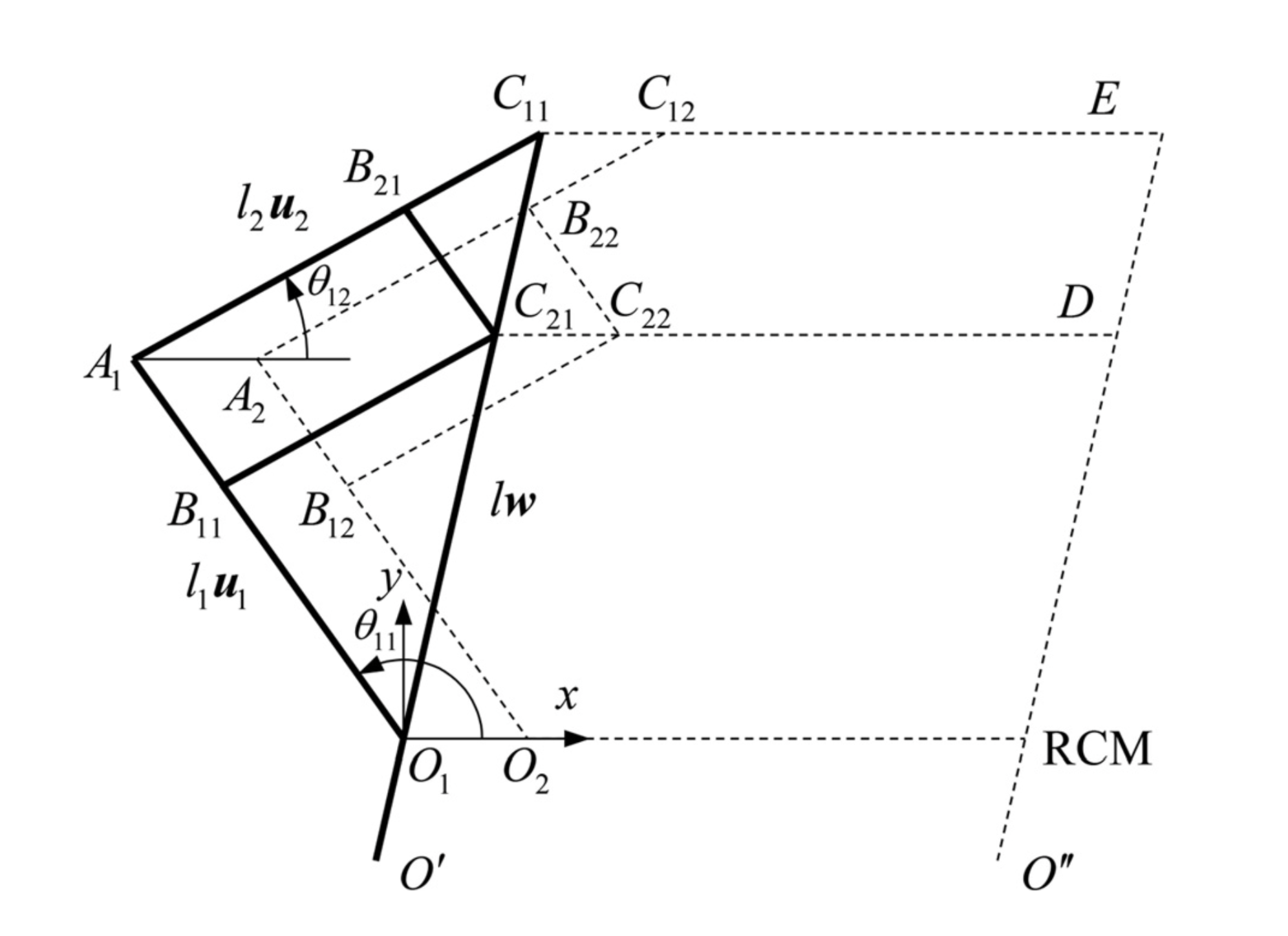
The design & analysis of a double parallelogram RCM mechanism for ME 5250 (Northeastern University)
The animation video for a robot wrist mechanism for ME 5250 (Northeastern University)
Operate underwater robots to reduce marine biofouling on ferries, thereby improving their fuel efficiency.
Designed a stack for on-board computers, integrating wheel-speed sensors, and exploring the perception & localization framework.
Integrated & implemented the brake-by-wire system, and developed a ROS2 Python package for a load-cell handbrake
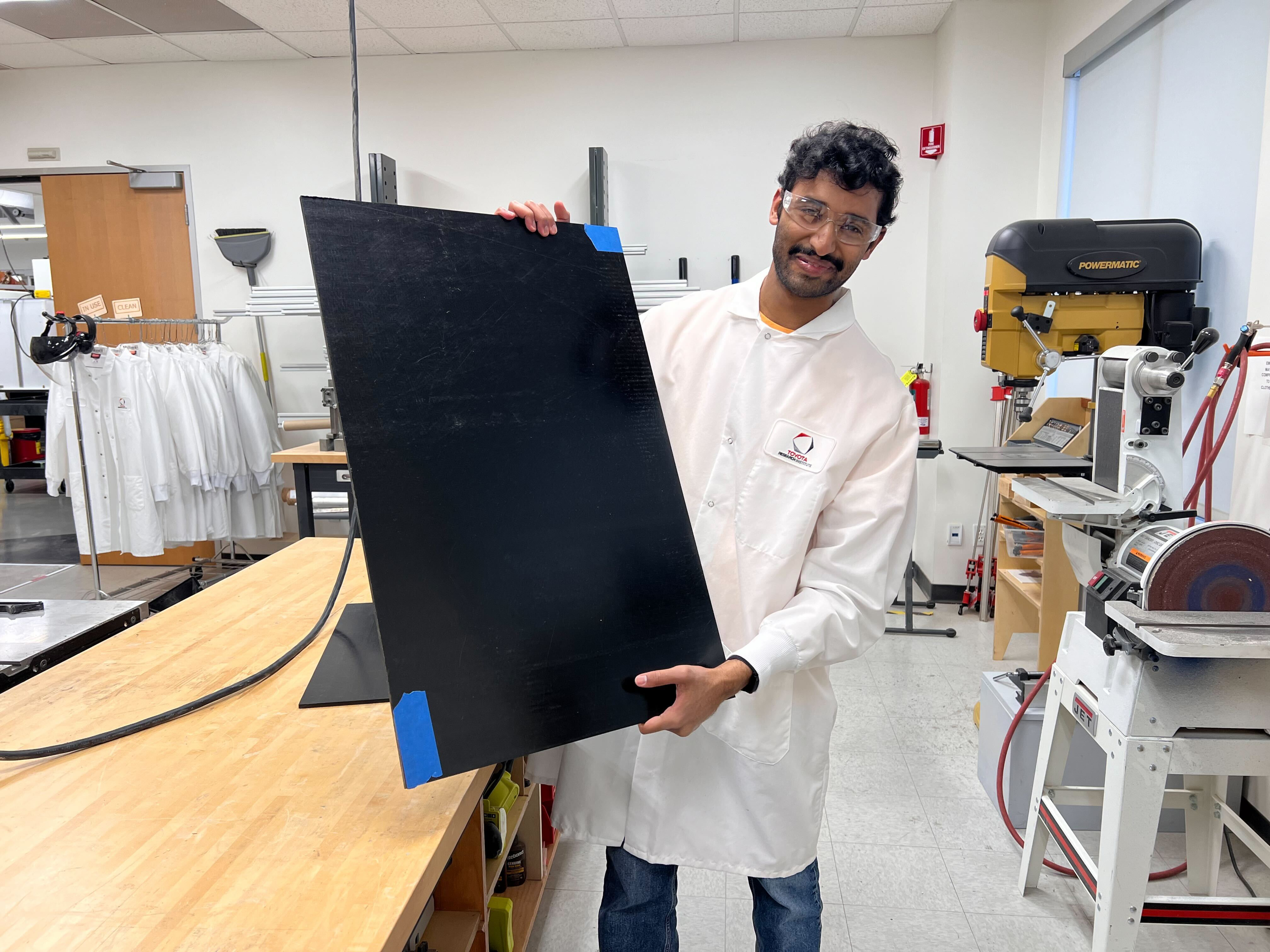
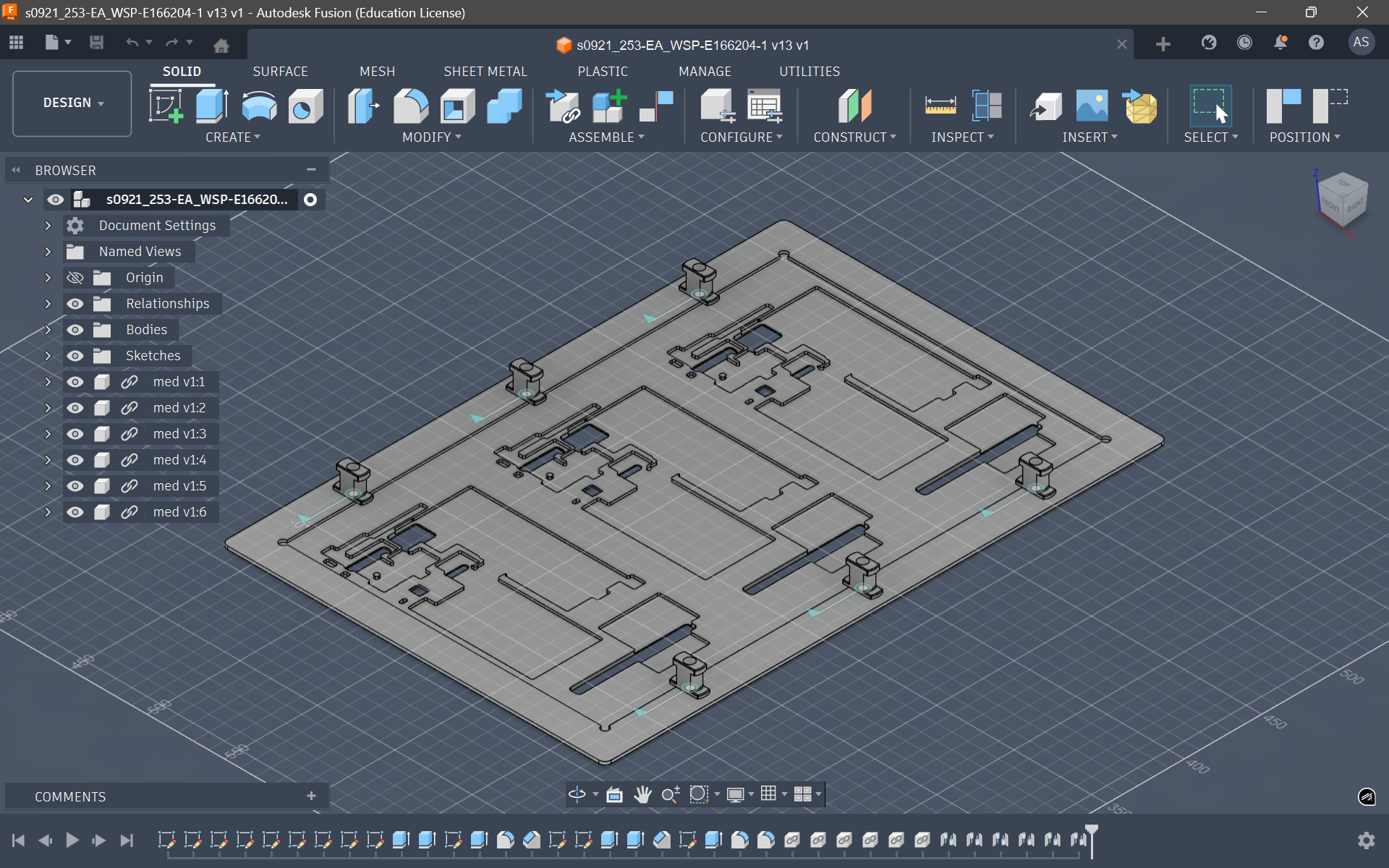
Designed PCB pallets to be used in the wave-soldering process
Used a collaborative robot arm to build a bridge from small colored wooden blocks
Built a line-following robot car that detected collisions through its IMU
Built a 3D Printed & Laser-cut mechanical transmission with forward, reverse, and neutral speeds
Designed & developed a quadruped using gear-cam and rigid linkage legs
Learned PID control through mini-projects under the guidance of my ‘Modeling of Dynamical Systems’ instructing professor
Built a mechatronic tilt device to be used in an industrial setting