NU Double Parallelogram RCM Mechanism
Timeline: Fall 2025
Location: Boston, MA, USA
Skills: 3D CAD (Onshape)
Inspired by the parallelogram mechanism in robots like the Da Vinci system in Minimally Invasive Surgery, I explored the design and analysis of a double-parallelogram remote center of motion mechanism. This was for my first project in my Robot Mechanics and Control (ME 5250) course at Northeastern University.
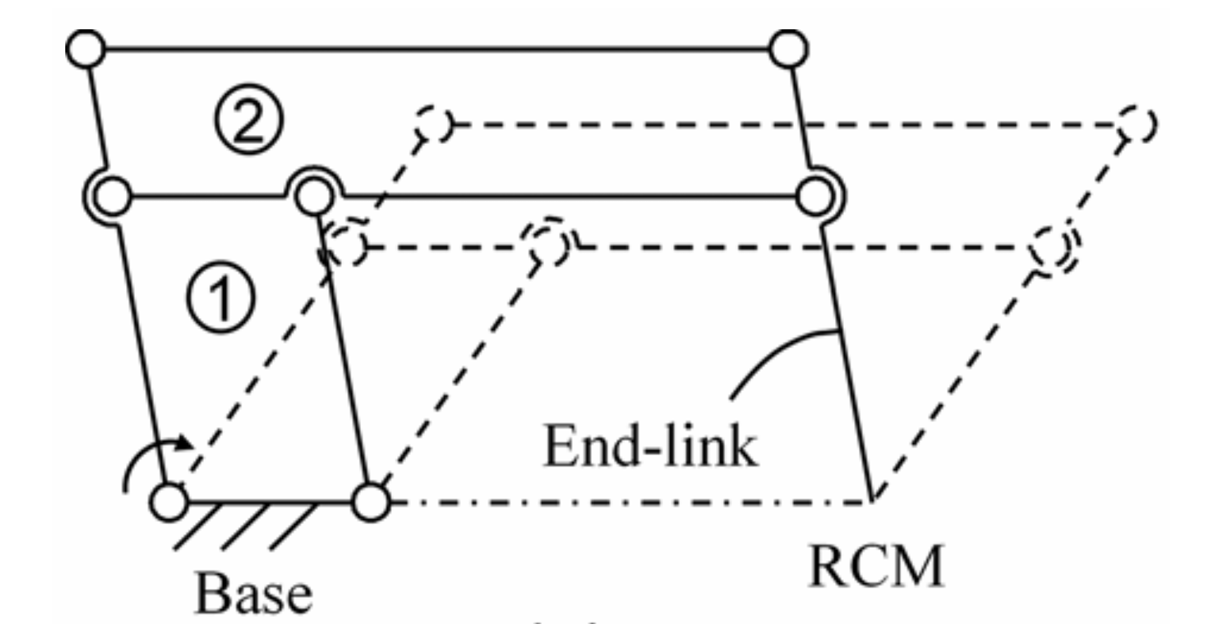
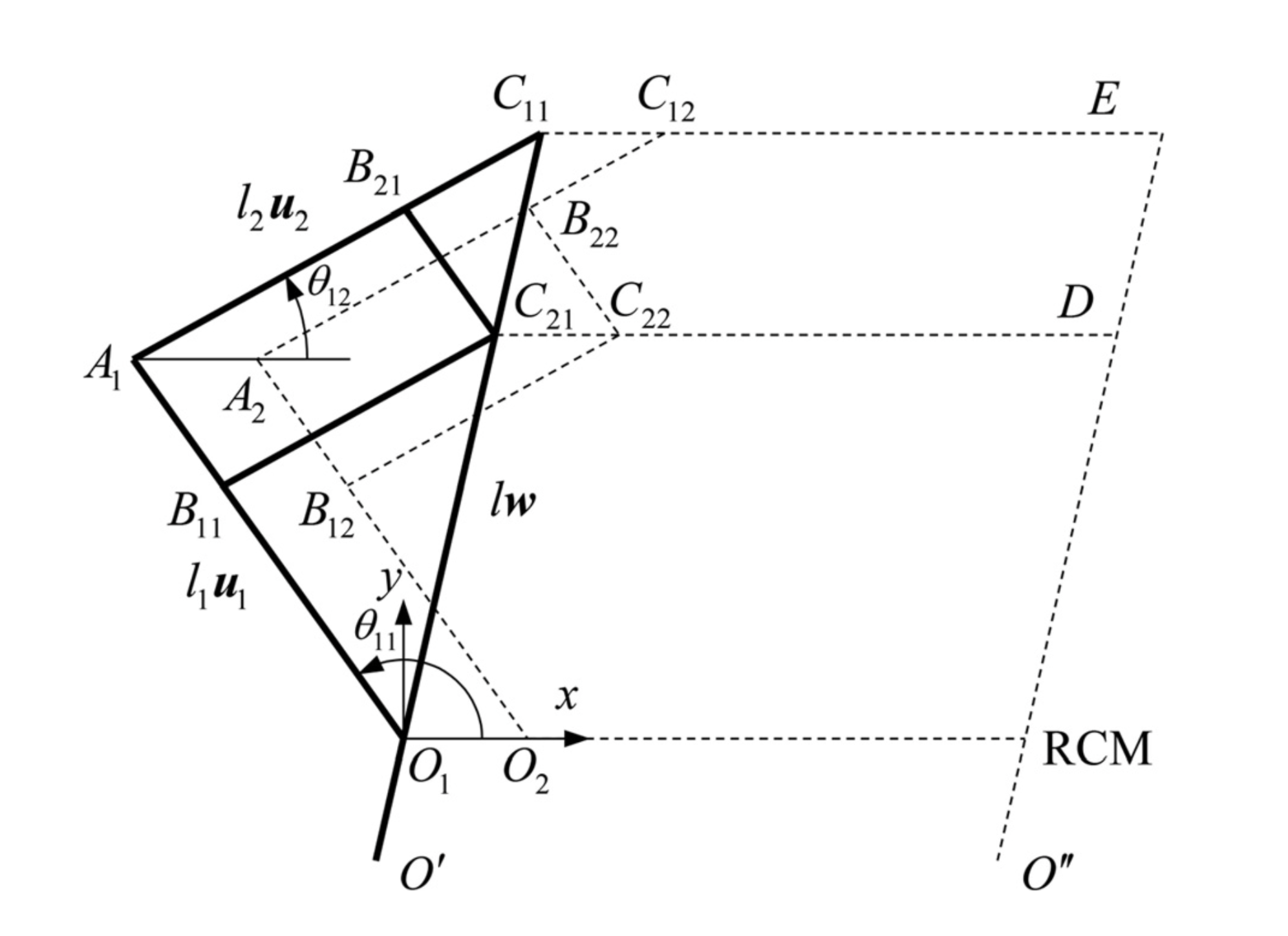
To further understand this mechanism’s ability to rotate its end-effector around a fixed point without the presence of a physical revolute joint, I performed a survey of the existing literature. I first looked at 1-DOF RCM mechanisms formed by combining two parallelogram linkages, as seen below
I then moved on to 2-DOF RCM mechanisms formed by the serial connection of two parallelograms.
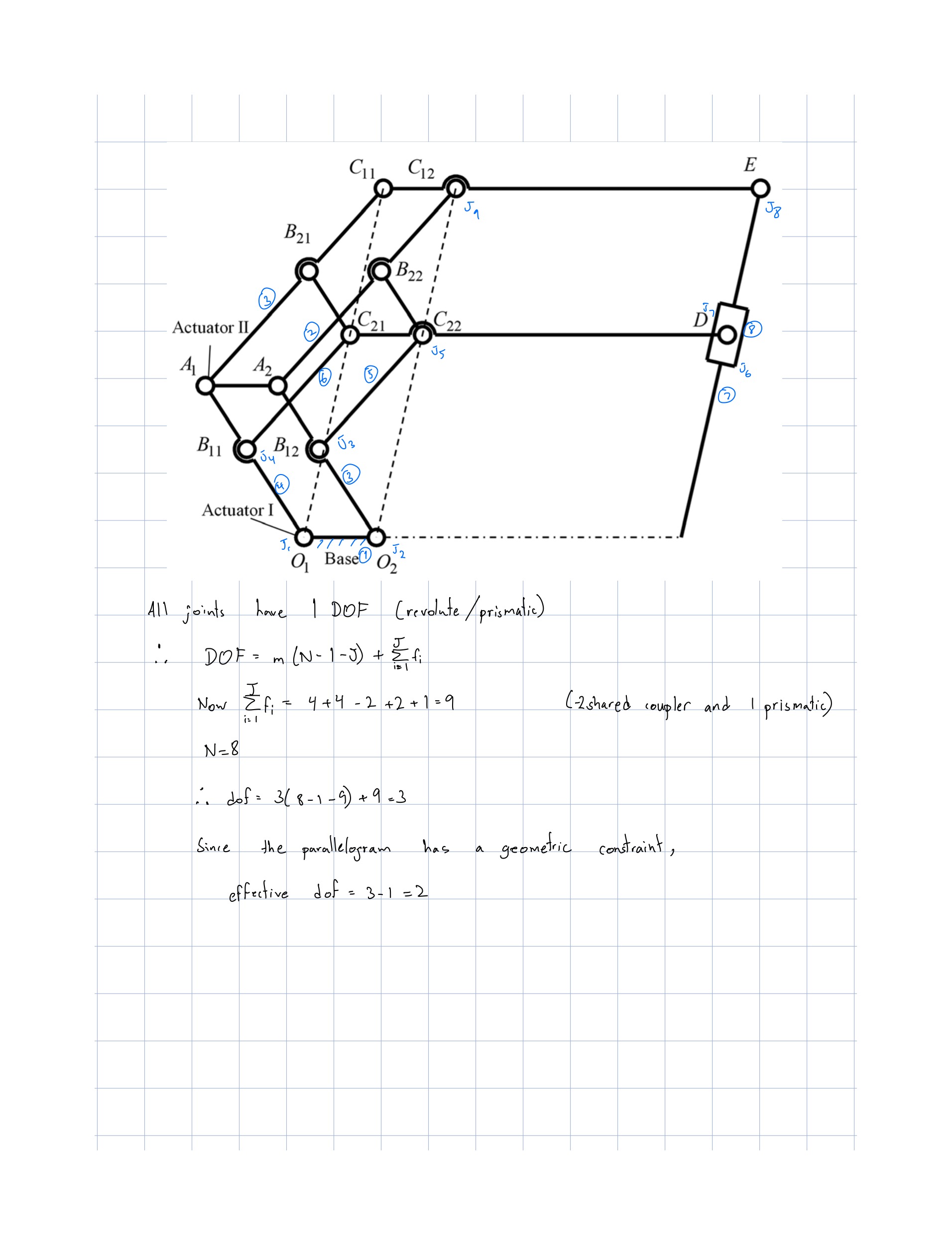
I performed a mobility analysis using Grubler’s formula to demonstrate 2 DOF while maintaining a total joint count of 9. Intuitively, this made sense as the translation/insertion motions along the tool axis (end-effector).
I then used a simplified kinematic model of the mechanism to compute the Jacobian matrix of the linkage and identify the existing singularities (as shown in the report).
This project introduced me to the complex mechanics of remote-center-of-motion mechanisms, particularly double-parallelogram mechanisms. For more details, please refer to the Project Report.