NU Robot Wrist Mechanism animation
Timeline: Fall 2025
Location: Boston, MA, USA
Skills: 3D CAD (Onshape)
For the Robot Mechanics and Control (ME 5250) course at Northeastern University, I 3D modeled a 3-DOF parallel wrist mechanism based on the provided design. My model verified grounded/parallel actuation of all three DOFs.
Here is the video!
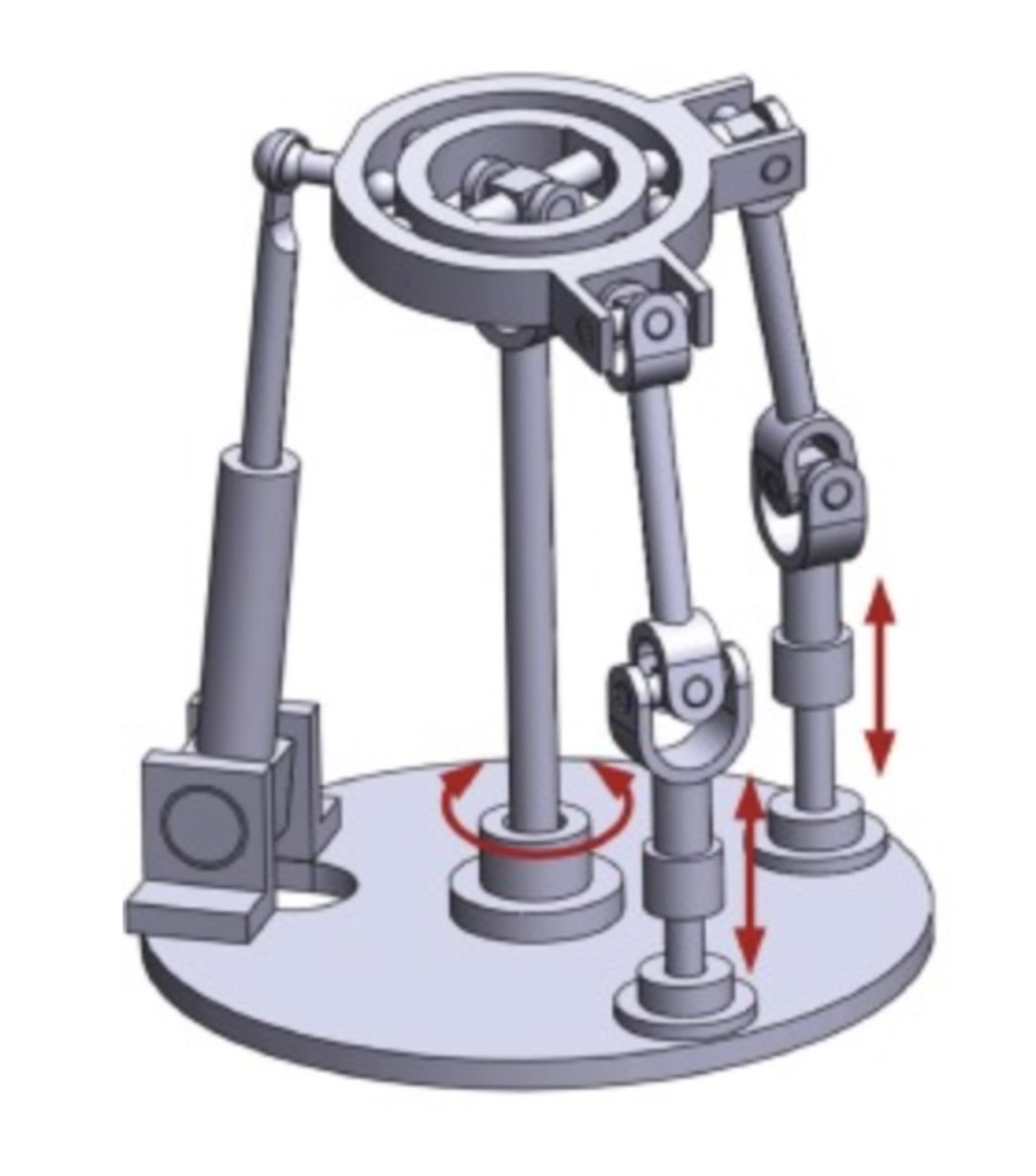
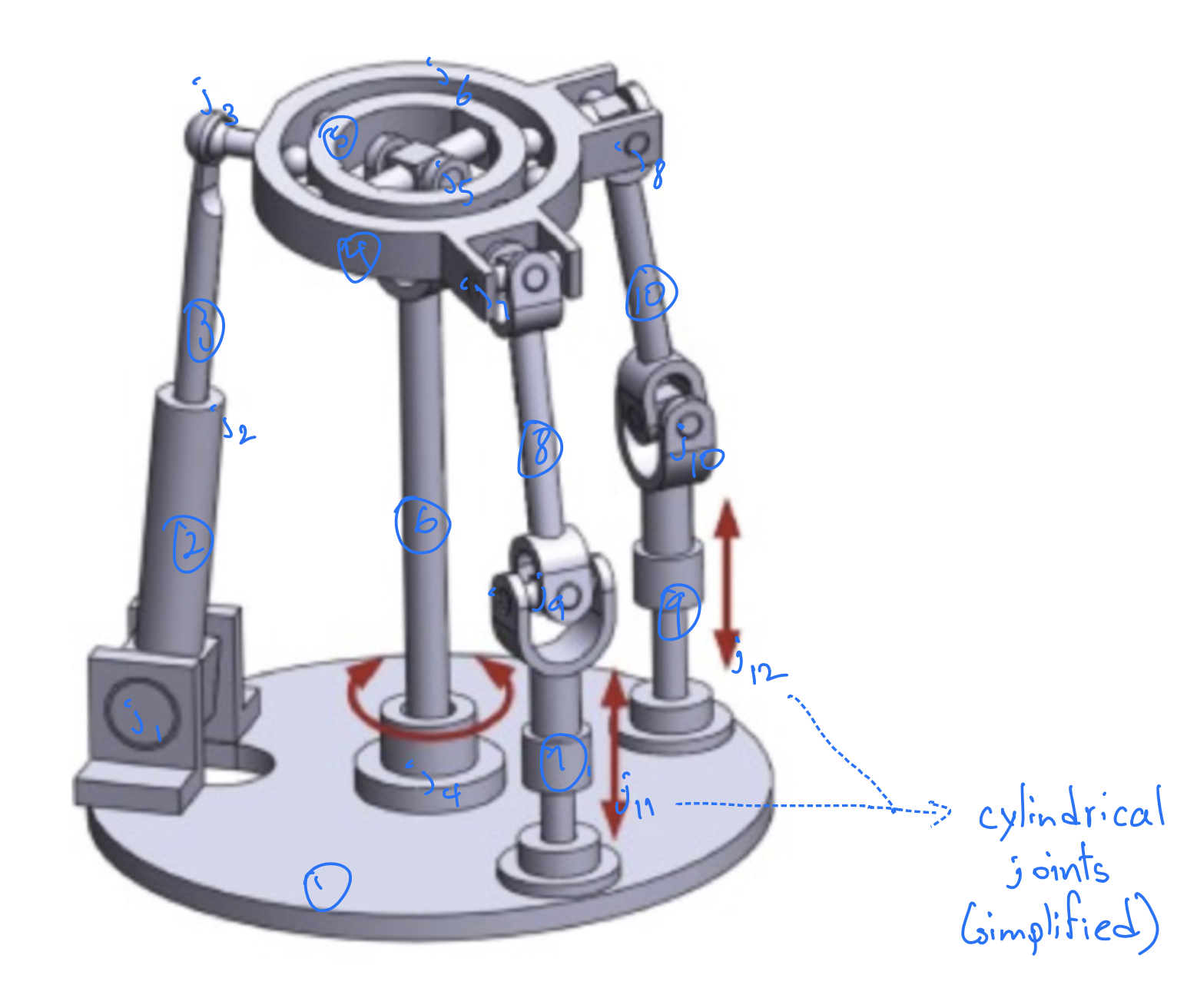
I built this model to better understand the original parallel wrist mechanism shown below.
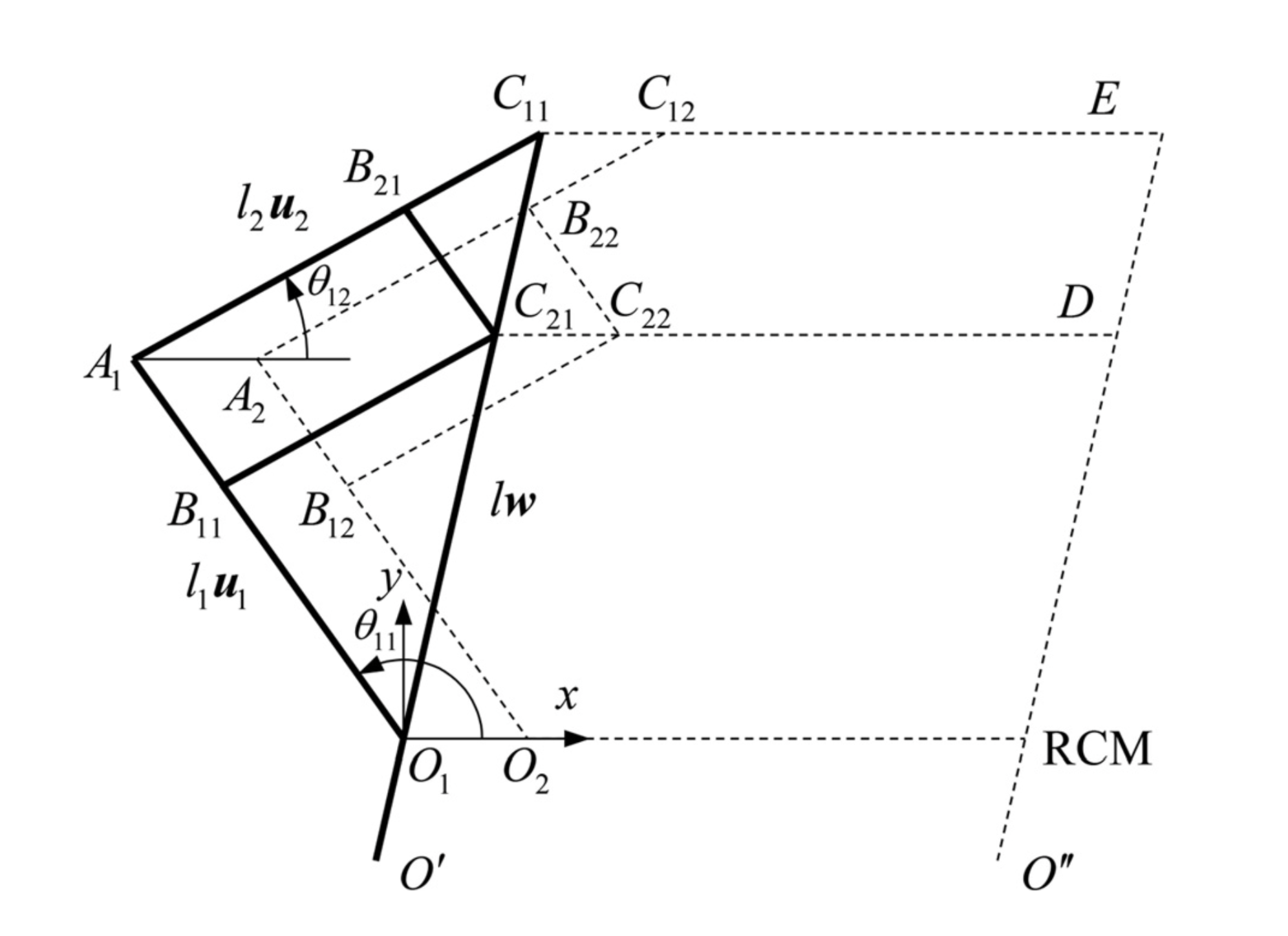
With the annotations (links and joints), I performed a mobility analysis of the mechanism using Grubler’s equation to verify that it has 3 DOF.
I also created drawings of the model to better showcase the 3D modeling. For more details, please take a look at the Project Report.